Introducing the MOTIF Hand: A Revolutionary Multimodal Robotic Hand for Advanced Manipulation
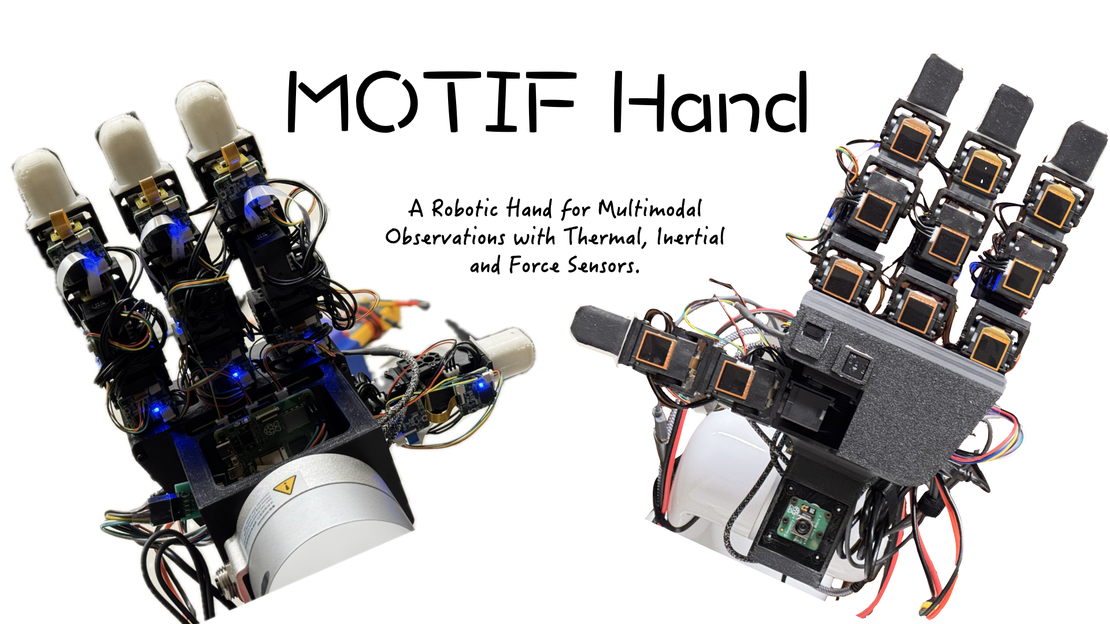
This paper presents the MOTIF Hand (Multimodal Observation with Thermal, Inertial, and Force sensors), a groundbreaking robotic hand that extends the LEAP hand design with comprehensive multimodal sensing capabilities including dense tactile information, thermal imaging, depth sensing, and inertial measurement units.
Read More