Research
- Home /
- Categories /
- Research
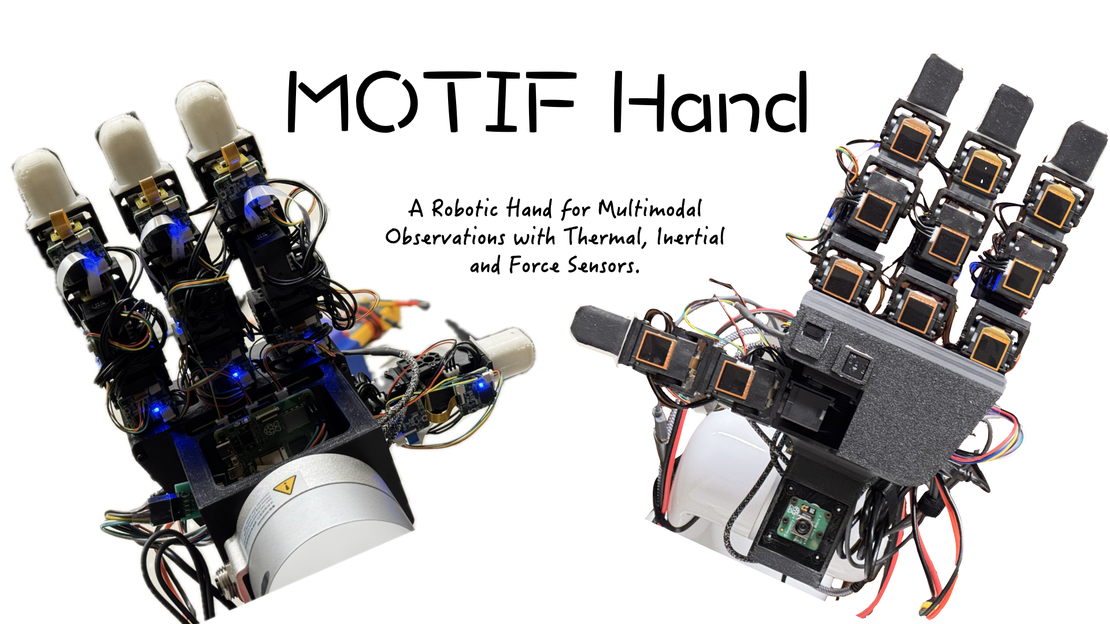
Introducing the MOTIF Hand: A Revolutionary Multimodal Robotic Hand for Advanced Manipulation
This paper presents the MOTIF Hand (Multimodal Observation with Thermal, Inertial, and Force sensors), a groundbreaking robotic hand that extends the LEAP hand design with comprehensive multimodal sensing capabilities including dense tactile information, thermal imaging, depth sensing, and inertial measurement units.
Read More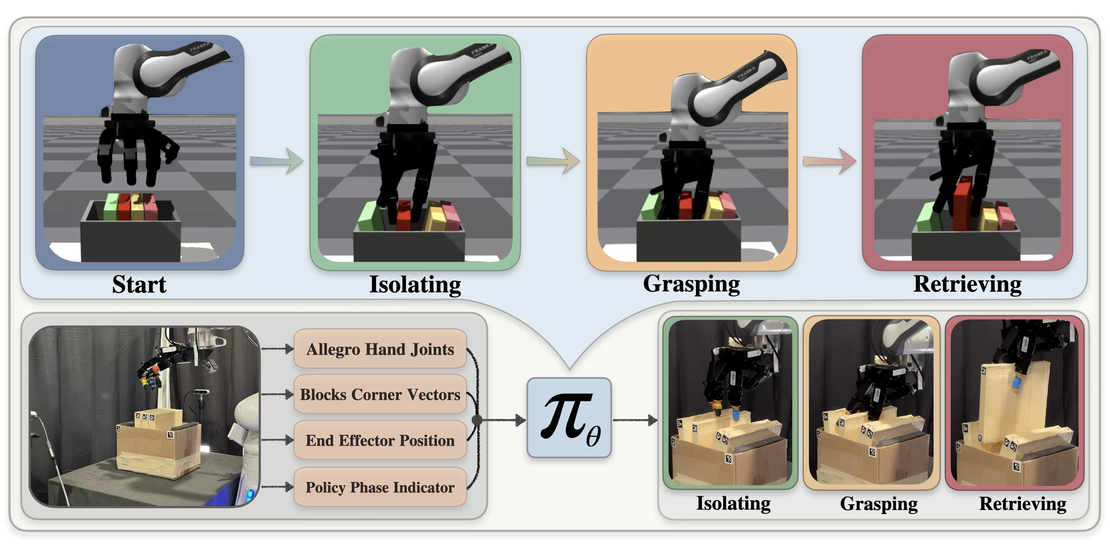
Learning to Singulate Objects in Packed Environments using a Dexterous Hand
This paper presents the Singulating Objects in Packed Environments (SOPE) framework, which utilizes a novel displacement-based state representation and a multi-phase RL approach to enable effective singulation of target objects in cluttered environments using a 16-DOF Allegro Hand.
Read More